Nachführung für GSO200/1200 (Teil II)
Mittwoch, 17. Januar 2007
Die Nachteile des Prototypes haben mich dazu veranlasst, eine neue Version zu bauen. Folgende Kriterien sollten berücksichtigt werden:
Günther und ich beschlossen gleich 2 Plattformen zu bauen - für jeder eine. Für die Berechnung kam meine bewerte Excel-Datei zum Einsatz, welche ich nun auch mit den genauen Maße der neue Plattform und eine Liste mit Teilen (+ Bestellnummern und Preise bei Reichelt und Conrad) ergänzt habe.
|


Kein ReibungsantriebReiner Vogel hatte mich vorgeschlagen, senkrechte elliptische Segmente (statt schräge kreisförmige) zu verwenden, um das Durchrutschen beim Reibungsantrieb zu vermeiden. Mir war die Erstellung der Ellipsen zu kompliziert und entschied mich für die einfachere Variante: ich habe das schräge Segment einfach eine Zahnstange verpasst:
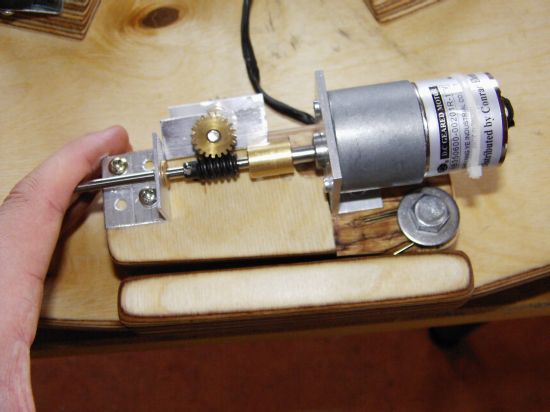
Später hat sich herausgestellt, dass dieses Verfahren zwei angenehme Vorteile hat: 1. Zahnrad + Zahnstange haben eine andere Untersetzung als die frühere Welle + Segment, dadurch kann der Motor langsamer laufen und damit wird er quasi unhörbar. 2.Conrads Zahnstange ist 25 cm lang und ich war bestrebt diese Stange in der volle Länge zu nutzen. Dadurch ist die Laufzeit mit knapp 2 Stunden angenehm lang geworden. |

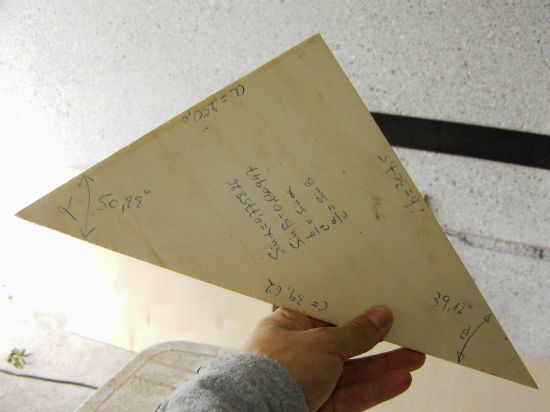
Niedrige MaterialkostenIm Vergleich zu kommerziell angebotene Plattforme ist diese Herstellungsweise kostengünstig. Die Herstellungskosten (ohne Stunden) belaufen auf ca. 160 €.Keine komplizierte HerstellungDas schwierigste in der Herstellung ist wohl das Segment. Dafür habe ich eine ganz einfache Lösung, die mit Heimwerker Geräte leicht umzusetzen ist. Die Oberfräse wird mit einem stück Holz worauf einen Stift montiert ist zum Zirkel umdisponiert. Der Radius entspricht den Wert C in der Excel-Datei:
Das Segment wird nun unter den Winkel Beta abgeschnitten. Ein Alulineal wird mit Schraubzwingen zur Führungsschiene umdisponiert:
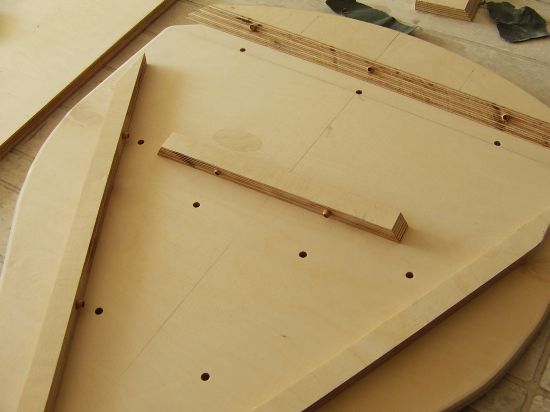
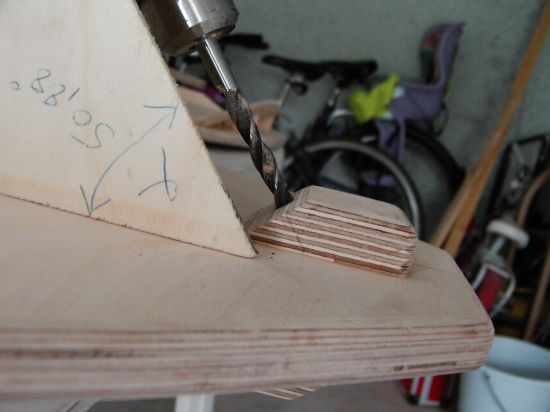
Kleine Dreiecken werden mit Hilfe der Schablone ebenfalls leicht hergestellt und werden später unter das Segment positioniert:
|





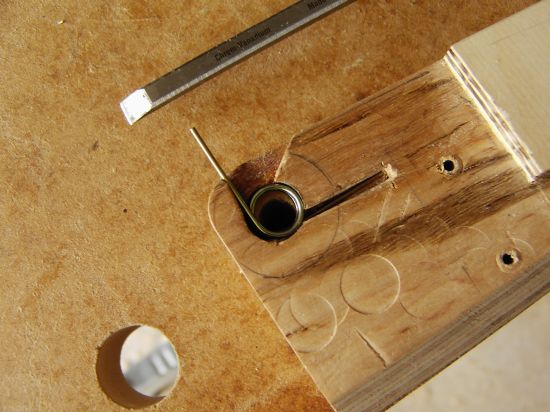
Einfaches zurückfahren der PlattformDas Zurückfahren der Plattform erfordert, dass der Motor leicht von der Zahnstange entkoppelt werden kann. Dazu habe ich zwei Stahlfeder (aus Papiereinzüge von defekte Laserdruckern) im Block eingearbeitet:
Die Obere (rechtsdrehende) Feder...
... und die untere (linksdrehende) Feder. Auch kann man hier sehen, dass das Holz mit einer Schicht Ebony-Star (oder ähnlich) beklebt wurde. Damit gleitet der Klotz besser auf die Bodenplatte.
Auch wenn ein schweres Teleskop auf die Platte steht, wird das Zurückfahren der Plattform zum Kinderspiel, der Block wird einfach zurückgezogen:
Beim Betrieb drücken die Feder das Zahnrad auf die Zahnstange. Wichtig ist auch, dass das Segment ganz leicht schief montiert ist (1 mm genügt). Damit drückt die Zahnstange den Klotz während des Nachführens immer weiter nach hinten entgegen Druckrichtung der Feder.
Günther steht für genial einfache Einfälle: er hat diesen Haken vorgeschlagen. Damit wird die Zahnstange nicht beschädigt beim Transport der Plattform:
|




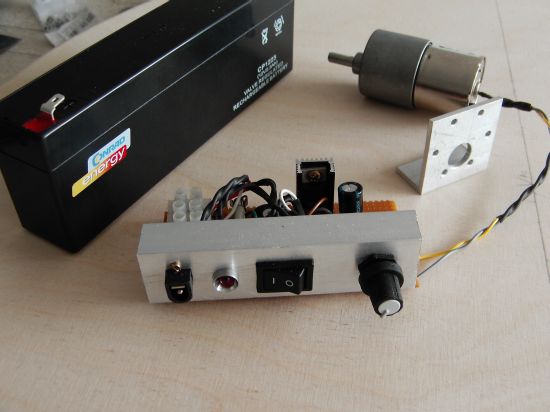
Elektronische SteuerungWenn schon, denn schon... eine genauere Geschwindigkeitsreglung muss her. Ich bin dafür Ekkehard (Pteng) gefolgt und habe uns eine Steuerung mit dem LM317 gebaut. So etwas gibt es übrigens auch fertig aufgebaut bei Conrad und Co, damit muss man dann nicht unbedingt selber zum Lötkolben greifen. Hier meine Version auf Lochrasterplatine: 
Die Buchse dient zur Aufladung der Akku. Auch kann man damit die Plattform mit einer externen 12V Spannung nutzen:
|
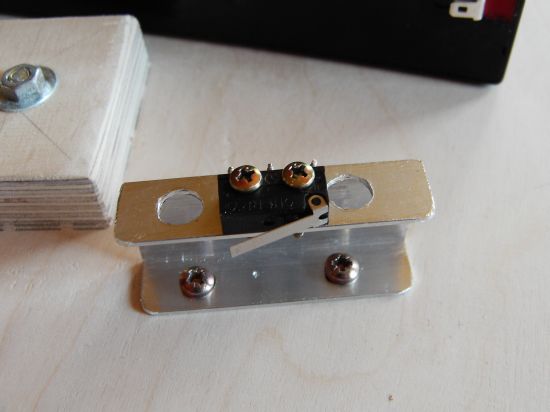
Automatische AbschaltungDer Motor muss anhalten bevor das Zahnrad sich festfrisst am Ende der Zahnstange. Wieder kamen Teile aus defekte Laserdruckern zum Einsatz. Die Dinger stecken voll mit Mikroschalter. Ich musste nur so ein Ding so befestigen dass die obere Platte es rechtseitig anstößt und damit die 12 V Leitung unterbricht:
|
Keine herumliegende KabelUnd so sieht das Ganze dann zusammengebaut auf der Bodenplatte aus. Es liegen keine Kabel mehr in der Gegend rum, weil die Akku und die Steuerung auf die Plattform montiert sind. Ich habe mittlerweile auch die alte Plattform in der Weise umgebaut - nachdem ich über die Kabel der separaten Steuerung gestolpert war. Die Steuerung steht links , dort wo wir am meisten sitzen wenn wir am Dobs beobachten Richtung Südost - Süd - Südwest. Damit ist die Steuerung stets gut erreichbar.
|

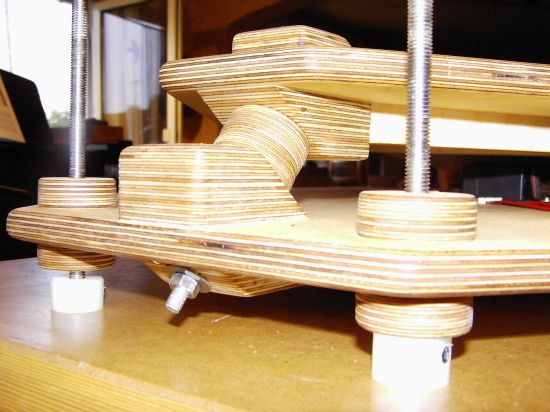
In der Höhe verstellbare FüßeAuch die Füße sind ein Produkt der grauen Zellen von Günther, ich finde sie einfach genial und sie tragen die vielen Kilos ziemlich stabil. Die Füße bestehen aus Teflon, M10 Edelstahl Drahtstange und Holzringe. Die beide untere Ringe haben M10 Einschlagmuttern worin die Drahtstange läuft. Der mittlere Ring ist nicht festgeklebt und funktioniert wie eine Kontermutter, damit wird der Fuß bombenfest auf die gewünschte Höhe eingestellt. Der obere Ring ist nur ein Griff zum drehen.
|

Transportsicherung und TragegriffWährend ich mir den Kopf zerbrach über die Frage wie ich einen Griff herstellen soll, erwähnte mein Kumpel nebenbei, dass er da vielleicht was hätte...
|
Hohe Stabilität und GenauigkeitDie Genauigkeit ist wie bei der alte Plattform auch: sehr gut. Jupiter bleibt z.B. bei 400 Fach mehr als 30 Minuten im Okular ohne manuelle Korrekturen am Dobs, für die visuelle Beobachtung reicht das vollkommen aus. Es hat sich jedoch herausgestellt, dass meine erste Konstruktion etwas wacklig und windanfällig war. Zwei genau positionierte zusätzliche Räder lösten das Problem:
Zugegeben, 18 mm Birken Multiplex ist schwer und das ganze wirkt wuchtig. Dafür ist die Plattform stabil und ich bin mir sicher, da kann auch mal einen 12 Zoll Volltubus drauf stehen...
|



